
Robotik & Handhabungstechnik
56
AUTOMATION 4
/
Juni 2011
nale an die Steuerung. Mit Toleranzen muss der
Roboter leben. Bevor der Roboter immer vier
Masseln auf einmal greift, wird per Taster die
„genaue“ Länge der Masseln erfasst, damit der
Roboter immer im Schwerpunkt greifen kann.
Intelligent genug wäre der Roboter, solche Er-
kenntnisse per Visionsystem zu gewinnen. Die
glänzende Oberfläche der Aluminiumbarren
und die durchaus nicht staubfreie Umgebung
lassen die Anlagenbauer jedoch auf einfache-
re, zuverlässige und wenige sensible Sensoren
zurückgreifen. Erlinger: „Wenn wir mit einem
einfachen Reedschalter oder einer simplen
Lichtschranke auskommen, würden wir mit ei-
nem Bildverarbeitungssystem mit Kanonen auf
Spatzen schießen.“
Kostengünstig heißt nicht billig
Die Auswahl eines Roboters begann mit der
Anfrage bei mehreren Herstellern. Martin Erlin-
ger: „Die Beratung hat einfach gepasst.“ Das
gilt sowohl für Fanuc als Roboterlieferanten
als auch für HMS, den Systemintegrator. Kei-
neswegs erstaunlich, dass Erlinger als erstes
der Auswahlkriterien den Preis nennt: „Unsere
Kunden erwarten, dass wir uns um die preis-
werteste Variante für eine Baugruppe wie den
Roboter kümmern.“ Ohne zu unterbrechen fügt
er jedoch hinzu: „Kostengünstig heißt allerdings
nicht zwangsläufig billig.“ Denn in der Gießerei
ist der Roboter 24 Stunden pro Tag im Einsatz.
Der kontinuierliche Anlagenbetrieb erfordert in
allen Anlagenteilen eine hohe Verfügbarkeit.
Ein „manuelles Hintertürchen“ haben die Anla-
genplaner von Hertwich Engineering offen ge-
lassen. Der Einsatz der Software-Option DCS
(Dual Check Safety) lässt beim geforderten ho-
hen Sicherheitsstandard eine manuelle Abnah-
me der Masseln zu. Manuel Ebner, der für das
österreichische Systemhaus HMS Mechatronik
das Projekt managte: „Die Sicherheitssoftware
DCS ist hier optimal eingesetzt.“ Durch die
Absicherung habe man den Schutzzaun rela-
tiv nahe am Roboter platzieren können. Denn
so konnte für einen unvorhergesehenen Stopp
eine manuelle, aber sehr sichere Entnahme
vorgesehen werden.
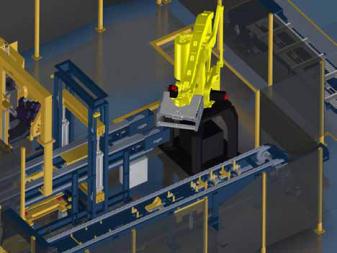
Bei einer Taktzeit von 2,7 s
muss der Roboter schnell und
zuverlässig zugreifen.
In der Simulation wurde die Funktionalität der
Anlage frühzeitig geprüft – und für gut befunden.