
60
AUTOMATION 4
/
Juni 2011
geometrisch hochpräzisen Aluminium-Hohl-
körper und einer 4 mm dick gummierten,
verschleißarmen Oberfläche, welche über
einen sehr hohen Haftreibungskoeffizienten
verfügt. Die exakte Kugelform und die hohe
Reibkraft ermöglichen dabei hohe Laufruhe,
äusserst dynamische Beschleunigungen und
hohe Geschwindigkeiten von bis zu 3.5 m/s
(knapp 13 km/h!). Nimmt man bekannte Ball-
bots als Referenz, zeigt sich, dass sich viele
von ihnen oftmals etwas „unrund“ bewegen
und eher durch Trägheit und Langsamkeit
auffallen.
Auch die drei im 120°-Winkel um die Kugel
angeordneten Omniwheels sind eine Eigen-
entwicklung. Denn auf dem Markt verfüg-
bare Lösungen konnten dem Anspruch auf
eine gänzlich geschlossene Aussenkontur
nicht genügen. Ihre aufwändige Geometrie,
die verlustarme Auslegung der einzelnen
Teile und die auf Kraftübertragung optimier-
te Oberfläche resultieren in einer ausser-
gewöhnlichen, hochwertigen Konstruktion.
Angetrieben werden die Räder durch Motor/
Getriebe-Kombinationen von maxonmo-
tor. Sie bestehen jeweils aus einem maxon
EC-4pole 30 , einem Planetengetriebe GP
42 C und Winkelencoder HEDL 5540. Die
Aufhängung der Antriebe ist so gestaltet,
dass die Kugel optimal unter den drei Omni-
wheels liegt und stets Kraftschluss besteht.
Geregelt werden die Antriebe über maxon-
PositioniersteuerungenEPOS 70/10, welche
im CAN-Netzwerk als Slaves im Stromregler-
Modus adressiert werden. Die Koordination
der drei Antriebe übernimmt der echtzeitfä-
hige Low-Level-Rechner.
Das Antriebssystem besticht durch ausge-
sprochen hohe Dynamik bei Beschleunigung
und Verzögerung, hohe Geschwindigkeiten
und gleichzeitig hochpräzise Positionierung
und hohe Laufruhe.
Steuerung, Lagekontrolle und Sensorik
Die Steuerung übernehmen zwei Rechnersys-
teme; ein echtzeitfähiger Low-Level-Rechner
zur schnellen, präzisen Regelung von Gleich-
gewicht und Lage und ein High-Level-Com-
puter unter Linux mit dem Roboter-Betriebs-
system ROS (Robot Operating System), der
die Interaktion mit der Umgebung übernimmt.
Rezero kann über verschiedene Eingabe-
methoden, wie Joystick oder Trajektorien-
planung mittels MATLAB gesteuert werden.
Ebenso verfügt Rezero über einen „Spielmo-
dus“, in dem er sich innerhalb vorgegebener
Parameter(wie beispielsweise maximale Ge-
schwindigkeit, Beschleunigung, Bewegungs-
radius) von einer Gruppe von Personen durch
Schubsen und Antippen frei steuern lässt.
Die Inertial Measurement Unit (IMU; Inerti-
almesssystem) bildet einer der vitalen Kom-
ponenten des Roboters. Das System misst
translatorische und rotatorische Beschleuni-
gungen sowie die Neigungswinkel im Raum
und verfügt über einen Kompass.
Die Messwerte werden über einen internen
Kalmanfilter geglättet und an den Low-Le-
vel-Rechner übermittelt. Die Einheit arbeitet
mit einer Frequenz von 160 Hz und ist das
taktgebende Glied in der Regelkette. Zur
Wahrnehmung seiner Umgebung verfügt
Rezero über verschiedene Laser- und Ultra-
schallsensoren.
Deren Anordnung ermöglicht die 360°-Rund-
umerkennung von Objekten bis zu einer Ent-
fernung von ca.6.5 m. Je nach gewähltem
Modus werden erfasste Objekte als Hinder-
nisse gewertet oder sie lassen sich in das
Roboter-eigene Verhalten miteinbeziehen.
So kann Rezero beispielsweise die „Verfol-
gung“ von erfassten Personen aufnehmen.
Ergänzt werden die sensorischen Fähigkeiten
durch Umgebungsmikrofhone, deren Signa-
le in das Verhalten miteinbezogen werden.
Formschön und elegant
Kinder (kleine und auch große!) können der
Verlockung kaum widerstehen, den Robo-
ter zu berühren, mit ihm zu spielen oder ihn
zu sich zu rufen. Dies nicht nur, weil er sich
sehr organisch bewegt, sondern auch weil
sein Äusseres sehr sympathisch und einla-
dend daherkommt. Die Charakteristik seiner
Bewegung widerspiegelt sich auch in seiner
äußeren Verpackung; rund, schön geformt,
charakterstark, dynamisch und elegant.
Das Endresultat
Rezero ist der erste Ballbot, bei dem nicht
nur das Balancieren sondern auch das Aus-
reizen des unvergleichbaren Bewegungs-
potenztials eines Ballbots im Vordergrund
stehen. Das vom Projektteam ausgearbei-
tete Konzept besticht: Die Eigenentwicklung
mechatronischer Elemente ist sehr gelun-
gen, die hohe Güte der Ausführung und die
Disziplinen-übergreifende Gesamtlösung
machen Rezero zum herausragenden Hingu-
cker. So verwundert nicht, dass Rezero die
Aufmerksamkeit von namhaften Unterneh-
men der Film- und Unterhaltungsindustrie
auf sich gezogen hat. Gewiss wird Rezero
in naher Zukunft von einem breiten Publikum
bestaunt werden können und sich von sei-
nen besten Seiten zeigen.
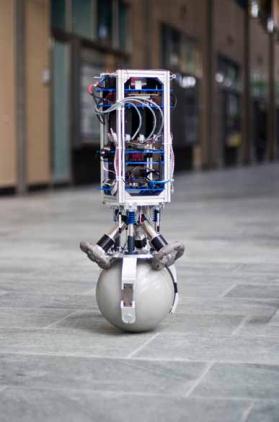
links
Rezero „hüllenlos“
rechts
Antrieb:
Motor EC-4pole 30,
Planetengetriebe
GP 42 C, Winkelencoder
HEDL 5540, Omniwheel.